![]()


MIVisionX toolkit is a set of comprehensive computer vision and machine intelligence libraries, utilities, and applications bundled into a single toolkit. AMD MIVisionX delivers highly optimized open-source implementation of the Khronos OpenVX™ and OpenVX™ Extensions along with Convolution Neural Net Model Compiler & Optimizer supporting ONNX, and Khronos NNEF™ exchange formats. The toolkit allows for rapid prototyping and deployment of optimized computer vision and machine learning inference workloads on a wide range of computer hardware, including small embedded x86 CPUs, APUs, discrete GPUs, and heterogeneous servers.
Latest Release#
Table of Contents#
Documentation#
Run the steps below to build documentation locally.
cd docs
pip3 install -r .sphinx/requirements.txt
python3 -m sphinx -T -E -b html -d _build/doctrees -D language=en . _build/html
AMD OpenVX™#
![]()
AMD OpenVX™ is a highly optimized conformant open source implementation of the Khronos OpenVX™ 1.3 computer vision specification. It allows for rapid prototyping as well as fast execution on a wide range of computer hardware, including small embedded x86 CPUs and large workstation discrete GPUs.
Khronos OpenVX™ 1.0.1 conformant implementation is available in MIVisionX Lite
AMD OpenVX Extensions#
The OpenVX framework provides a mechanism to add new vision functionality to OpenVX by vendors. This project has below mentioned OpenVX modules and utilities to extend amd_openvx, which contains the AMD OpenVX™ Core Engine.

amd_loomsl: AMD Radeon Loom stitching library for live 360 degree video applications
amd_media:
vx_amd_mediais an OpenVX AMD media extension module for encode and decodeamd_migraphx: amd_migraphx extension integrates the AMD’s MIGraphx into an OpenVX graph. This extension allows developers to combine the vision funcions in OpenVX with the MIGraphX and build an end-to-end application for inference.
amd_nn: OpenVX neural network module
amd_opencv: OpenVX module that implements a mechanism to access OpenCV functionality as OpenVX kernels
amd_rpp: OpenVX extension providing an interface to some of the RPP’s (ROCm Performance Primitives) functions. This extension is used to enable rocAL to perform image augmentation.
amd_winml: WinML extension will allow developers to import a pre-trained ONNX model into an OpenVX graph and add hundreds of different pre & post processing
vision/generic/user-definedfunctions, available in OpenVX and OpenCV interop, to the input and output of the neural net model. This will allow developers to build an end to end application for inference.
Applications#
MIVisionX has several applications built on top of OpenVX modules, it uses AMD optimized libraries to build applications that can be used to prototype or use as a model to develop products.

Bubble Pop: This sample application creates bubbles and donuts to pop using OpenVX & OpenCV functionality.
Cloud Inference Application: This sample application does inference using a client-server system.
Digit Test: This sample application is used to recognize hand written digits.
Image Augmentation: This sample application demonstrates the basic usage of rocAL’s C API to load JPEG images from the disk and modify them in different possible ways and displays the output images.
MIVisionX Inference Analyzer: This sample application uses pre-trained
ONNX/NNEF/Caffemodels to analyze and summarize images.MIVisionX OpenVX Classification: This sample application shows how to run supported pre-trained caffe models with MIVisionX RunTime.
MIVisionX Validation Tool: This sample application uses pre-trained
ONNX/NNEF/Caffemodels to analyze, summarize and validate models.MIVisionX WinML Classification: This sample application shows how to run supported ONNX models with MIVisionX RunTime on Windows.
MIVisionX WinML YoloV2: This sample application shows how to run tiny yolov2(20 classes) with MIVisionX RunTime on Windows.
Optical Flow: This sample application creates an OpenVX graph to run Optical Flow on a video/live.
Neural Net Model Compiler & Optimizer#
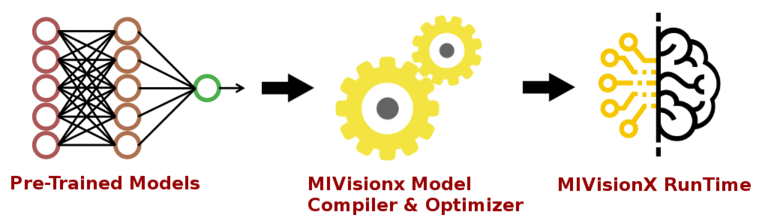
Neural Net Model Compiler & Optimizer converts pre-trained neural net models to MIVisionX runtime code for optimized inference.
rocAL#
The ROCm Augmentation Library - rocAL is designed to efficiently decode and process images and videos from a variety of storage formats and modify them through a processing graph programmable by the user.
Toolkit#
MIVisionX Toolkit, is a comprehensive set of helpful tools for neural net creation, development, training, and deployment. The Toolkit provides you with helpful tools to design, develop, quantize, prune, retrain, and infer your neural network work in any framework. The Toolkit is designed to help you deploy your work to any AMD or 3rd party hardware, from embedded to servers.
MIVisionX provides you with tools for accomplishing your tasks throughout the whole neural net life-cycle, from creating a model to deploying them for your target platforms.
Utilities#
inference_generator: generate inference library from pre-trained CAFFE models
loom_shell: an interpreter to prototype 360 degree video stitching applications using a script
RunVX: command-line utility to execute OpenVX graph described in GDF text file
RunCL: command-line utility to build, execute, and debug OpenCL programs
Prerequisites#
Hardware#
GPU: GFX7 or later [optional]
APU: Carrizo or later [optional]
Note: Some modules in MIVisionX can be built for
CPU ONLY. To take advantage ofAdvanced Features And Moduleswe recommend usingAMD GPUsorAMD APUs.
Operating System#
Windows#
Windows 10
Windows SDK
Visual Studio 2019 or later
Install the latest AMD drivers
Install OpenCL SDK
Install OpenCV 4.5.5
Set
OpenCV_DIRenvironment variable toOpenCV/buildfolderAdd
%OpenCV_DIR%\x64\vc14\binor%OpenCV_DIR%\x64\vc15\binto yourPATH
macOS#
Install Homebrew
Install CMake
Install OpenCV
3/4Note: macOS build instructions
Linux#
Linux distribution
Ubuntu -
18.04/20.04CentOS -
7/8
Install ROCm
CMake 3.0 or later
ROCm MIOpen for
Neural Net Extensions(vx_nn)Qt Creator for Cloud Inference Client
Protobuf for inference generator & model compiler
install
libprotobuf-devandprotobuf-compilerneeded for vx_nn
-
Set
OpenCV_DIRenvironment variable toOpenCV/buildfolder
-
FFMPEG is required for amd_media & mv_deploy modules
rocAL Prerequisites
Prerequisites setup script for Linux#
For the convenience of the developer, we provide the setup script MIVisionX-setup.py which will install all the dependencies required by this project.
NOTE: This script only needs to be executed once.
Prerequisites for running the script#
Linux distribution
Ubuntu -
18.04/20.04CentOS -
7/8
-
usage:
python MIVisionX-setup.py --directory [setup directory - optional (default:~/)] --opencv [OpenCV Version - optional (default:4.5.5)] --miopen [MIOpen Version - optional (default:2.14.0)] --miopengemm[MIOpenGEMM Version - optional (default:1.1.5)] --protobuf [ProtoBuf Version - optional (default:3.12.0)] --rpp [RPP Version - optional (default:0.91)] --ffmpeg [FFMPEG V4.0.4 Installation - optional (default:no) [options:yes/no]] --rocal [MIVisionX rocAL Dependency Install - optional (default:yes) [options:yes/no]] --neural_net[MIVisionX Neural Net Dependency Install - optional (default:yes) [options:yes/no]] --reinstall [Remove previous setup and reinstall (default:no)[options:yes/no]] --backend [MIVisionX Dependency Backend - optional (default:HIP) [options:OCL/HIP]] --rocm_path [ROCm Installation Path - optional (default:/opt/rocm) - ROCm Installation Required]
Note:
ROCm upgrade with
sudo apt upgraderequires the setup script rerun.use
X Window/X11for remote GUI app control
Build & Install MIVisionX#
Building on Windows#
Using .msi packages#
MIVisionX-installer.msi: MIVisionX
MIVisionX_WinML-installer.msi: MIVisionX for WinML
Using Visual Studio#
Install Windows Prerequisites
Use
MIVisionX.slnto build for x64 platformNOTE:
vx_nnis not supported onWindowsin this release
Building on macOS#
macOS build instructions
Building on Linux#
Using apt-get or yum#
Install ROCm
On
Ubuntusudo apt-get install mivisionx
On
CentOSsudo yum install mivisionx
Note:
vx_winmlis not supported onLinuxsource code will not available with
apt-get/yuminstallthe installer will copy
executables into
/opt/rocm/mivisionx/binlibraries into
/opt/rocm/mivisionx/libOpenVX and module header files into
/opt/rocm/mivisionx/includemodel compiler, toolkit, & samples placed in
/opt/rocm/mivisionx
Package (.deb & .rpm) install requires
OpenCV v3+to executeAMD OpenCV extensions
Using MIVisionX-setup.py#
Install ROCm
Use the below commands to set up and build MIVisionX
git clone https://github.com/GPUOpen-ProfessionalCompute-Libraries/MIVisionX.git cd MIVisionX
Note: MIVisionX has support for two GPU backends: OPENCL and HIP:
Instructions for building MIVisionX with the HIP GPU backend (i.e., default GPU backend):
run the setup script to install all the dependencies required by the HIP GPU backend:
python MIVisionX-setup.py
run the below commands to build MIVisionX with the HIP GPU backend:
mkdir build-hip cd build-hip cmake ../ make -j8 sudo make install
Instructions for building MIVisionX with OPENCL GPU backend:
run the setup script to install all the dependencies required by the OPENCL GPU backend:
python MIVisionX-setup.py --reinstall yes --backend OCL
run the below commands to build MIVisionX with the OPENCL GPU backend:
mkdir build-ocl cd build-ocl cmake -DBACKEND=OPENCL ../ make -j8 sudo make install
Note:
MIVisionX cannot be installed for both GPU backends in the same default folder (i.e., /opt/rocm/mivisionx) if an app interested in installing MIVisionX with both GPU backends, then add -DCMAKE_INSTALL_PREFIX in the cmake commands to install MIVisionX with OPENCL and HIP backends into two separate custom folders.
vx_winml is not supported on Linux
Verify the Installation#
Verifying on Linux / macOS#
The installer will copy
executables into
/opt/rocm/mivisionx/binlibraries into
/opt/rocm/mivisionx/libOpenVX and OpenVX module header files into
/opt/rocm/mivisionx/includeApps, Samples, Documents, Model Compiler, and Toolkit are placed into
/opt/rocm/mivisionx
Run the below sample to verify the installation
Canny Edge Detection
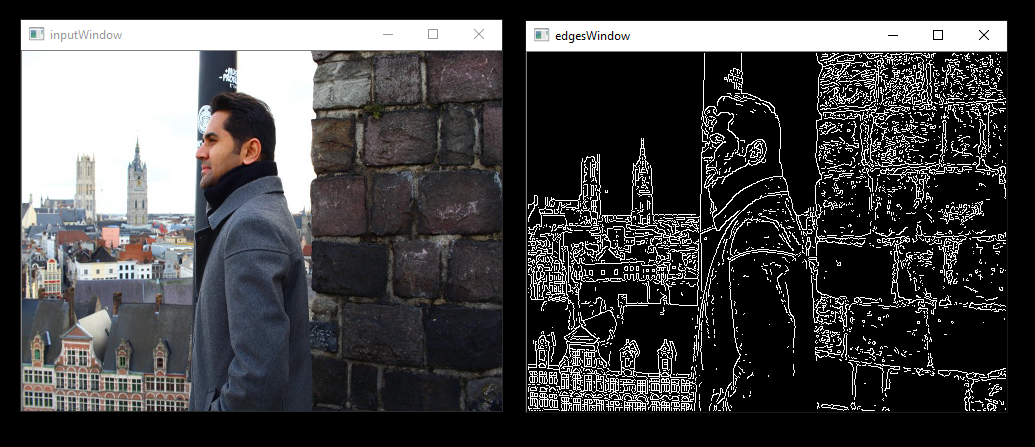
export PATH=$PATH:/opt/rocm/mivisionx/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/mivisionx/lib runvx /opt/rocm/mivisionx/samples/gdf/canny.gdf
Note: More samples are available here
Note: For
macOSuseexport DYLD_LIBRARY_PATH=$DYLD_LIBRARY_PATH:/opt/rocm/lib
Verifying on Windows#
MIVisionX.sln builds the libraries & executables in the folder
MIVisionX/x64Use RunVX to test the build
./runvx.exe PATH_TO/MIVisionX/samples/gdf/skintonedetect.gdf
Docker#
MIVisionX provides developers with docker images for Ubuntu 18.04 / 20.04 and CentOS 7 / 8. Using docker images developers can quickly prototype and build applications without having to be locked into a single system setup or lose valuable time figuring out the dependencies of the underlying software.
Docker files to build MIVisionX containers are available
MIVisionX Docker#
Docker Workflow Sample on Ubuntu 18.04 / 20.04#
Sample Prerequisites#
Ubuntu
18.04/20.04
Sample Workflow#
Step 1 - Install rocm-dkms
sudo apt update
sudo apt dist-upgrade
sudo apt install libnuma-dev
sudo reboot
wget -qO - http://repo.radeon.com/rocm/apt/debian/rocm.gpg.key | sudo apt-key add -
echo 'deb [arch=amd64] http://repo.radeon.com/rocm/apt/debian/ xenial main' | sudo tee /etc/apt/sources.list.d/rocm.list
sudo apt update
sudo apt install rocm-dkms
sudo reboot
Step 2 - Setup Docker
sudo apt-get install curl
sudo curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
sudo apt-get update
apt-cache policy docker-ce
sudo apt-get install -y docker-ce
sudo systemctl status docker
Step 3 - Get Docker Image
sudo docker pull mivisionx/ubuntu-18.04
Step 4 - Run the docker image
sudo docker run -it --device=/dev/kfd --device=/dev/dri --cap-add=SYS_RAWIO --device=/dev/mem --group-add video --network host mivisionx/ubuntu-18.04:latest
Note:
Map host directory on the docker image
map the localhost directory to be accessed on the docker image.
use
-voption with docker run command:-v {LOCAL_HOST_DIRECTORY_PATH}:{DOCKER_DIRECTORY_PATH}usage:
sudo docker run -it -v /home/:/root/hostDrive/ --device=/dev/kfd --device=/dev/dri --cap-add=SYS_RAWIO --device=/dev/mem --group-add video --network host mivisionx/ubuntu-18.04:latest
Display option with docker
Using host display
xhost +local:root sudo docker run -it --device=/dev/kfd --device=/dev/dri --cap-add=SYS_RAWIO --device=/dev/mem --group-add video --network host --env DISPLAY=unix$DISPLAY --privileged --volume $XAUTH:/root/.Xauthority --volume /tmp/.X11-unix/:/tmp/.X11-unix mivisionx/ubuntu-18.04:latest
Test display with MIVisionX sample
export PATH=$PATH:/opt/rocm/mivisionx/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/mivisionx/lib runvx /opt/rocm/mivisionx/samples/gdf/canny.gdf
Technical Support#
Please email mivisionx.support@amd.com for questions, issues, and feedback on MIVisionX.
Please submit your questions, feature requests, and bug reports on the GitHub issues page.
Release Notes#
Latest Release Version#
Changelog#
Review all notable changes with the latest release
Tested configurations#
Windows 10
Linux distribution
Ubuntu -
18.04/20.04CentOS -
7/8SLES -
15-SP2
ROCm: rocm-dev -
4.5.2.40502-164rocm-cmake - rocm-4.2.0
MIOpenGEMM - 1.1.5
MIOpen - 2.14.0
Protobuf - V3.12.0
OpenCV - 4.5.5
RPP - 0.92
FFMPEG - n4.0.4
Dependencies for all the above packages
MIVisionX Setup Script -
V2.0.0
Known issues#
Package install requires OpenCV
V-3+to executeAMD OpenCV extensions
MIVisionX Dependency Map#
Docker Image: sudo docker build -f docker/ubuntu20/{DOCKER_LEVEL_FILE_NAME}.dockerfile -t {mivisionx-level-NUMBER} .

new component added to the level
existing component from the previous level
Build Level |
MIVisionX Dependencies |
Modules |
Libraries and Executables |
Docker Tag |
|---|---|---|---|---|
|
cmake |
amd_openvx |
|
|
|
ROCm OpenCL |
amd_openvx |
|
|
|
OpenCV |
amd_openvx |
|
|
|
MIOpenGEMM |
amd_openvx |
|
|
|
AMD_RPP |
amd_openvx |
|





NOTE: OpenVX and the OpenVX logo are trademarks of the Khronos Group Inc.