Performing causal profiling#
The process of causal profiling can be summarized as:
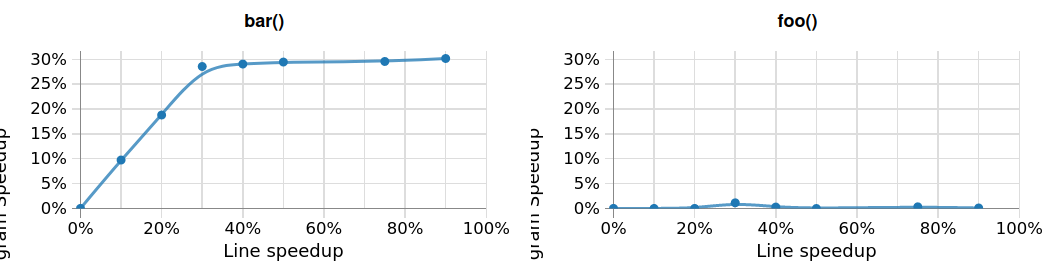
If you speed up a given block of code by X%, the application will run Y% faster.
Causal profiling directs parallel application developers to where they should focus their optimization efforts by quantifying the potential impact of optimizations. Causal profiling is rooted in the concept that software execution speed is relative. Speeding up a block of code by X% is mathematically equivalent to that block of code running at its current speed if all the other code is running slower by X%. Thus, causal profiling works by performing experiments on blocks of code during program execution which insert pauses to slow down all other concurrently running code. During post-processing, these experiments are translated into calculations for the potential impact of speeding up this block of code.
Consider the following C++ code executing foo and bar concurrently in two different threads
where foo is ideally 30% faster than bar:
#include <cstddef>
#include <thread>
constexpr size_t FOO_N = 7 * 1000000000UL;
constexpr size_t BAR_N = 10 * 1000000000UL;
void foo()
{
for(volatile size_t i = 0; i < FOO_N; ++i) {}
}
void bar()
{
for(volatile size_t i = 0; i < BAR_N; ++i) {}
}
int main()
{
std::thread _threads[] = { std::thread{ foo },
std::thread{ bar } };
for(auto& itr : _threads)
itr.join();
}
No matter how many optimizations are applied to foo, the application will always
require the same amount of time
because the end-to-end performance is limited by bar. However, a 5% speed-up
in bar results in the
end-to-end performance improving by 5%. This trend continues linearly, with a 10% speed-up
in bar yielding a 10% speed-up in
end-to-end performance, and so on, up to a 30% speed-up, at which point bar runs as fast as foo.
Any speed-up to bar beyond 30% still only yields an end-to-end performance
improvement of 30% because the application
is now limited by performance of foo, as demonstrated below in the causal
profiling visualization:
The full details of the causal profiling methodology can be found in the paper Coz: Finding Code that Counts with Causal Profiling. The author’s implementation is publicly available on GitHub.
Getting started#
To effectively use causal profiling, it is important to understand a few key concepts, such as progress points.
Progress points#
Causal profiling requires “progress points” to track progress through the code in between samples. Progress points must be triggered in a deterministic manner via instrumentation. This can happen in three different ways:
ROCm Systems Profiler can leverage the callbacks from Kokkos-Tools, OpenMP-Tools, rocprofiler-sdk, etc. and the wrappers around functions for MPI, NUMA, RCCL, etc. to act as progress points
Users can leverage the runtime instrumentation capabilities to insert progress points
Users can leverage User APIs, such as
ROCPROFSYS_CAUSAL_PROGRESS
Note
Binary rewrite to insert progress points is not supported. When a rewritten binary runs, Dyninst translates the instruction pointer address in order to perform the instrumentation. As a result, call stack samples never return instruction pointer addresses within the valid ROCm Systems Profiler range.
Key concepts#
Concept |
Setting |
Options |
Description |
|---|---|---|---|
Backend |
|
|
Backend for recording samples required to calculate the virtual speed-up |
Mode |
|
|
Select an entire function or individual line of code for causal experiments |
End-to-end |
|
Boolean |
Perform a single experiment during the entire run (does not require progress points) |
Fixed speed-up |
|
one or more values from [0, 100] |
Virtual speed-up or pool of virtual speed-ups to randomly select |
Binary scope |
|
regular expression(s) |
Dynamic binaries containing code for experiments |
Source scope |
|
regular expression(s) |
|
Function scope |
|
regular expression(s) |
Restricts experiments to matching functions (function mode) or lines of code within matching functions (line mode) |
Note
Binary scope defaults to
%MAIN%(in the executable), but the scope can be expanded to include linked libraries.<file>and<file>:<line>support requires debug info (for example, the code must be compiled with-gor, preferably, with-g3)Function mode does not require debug info but does not support stripped binaries
Backends#
There are two backends to choose from: perf and timer.
They are used to record the samples required to calculate the virtual speedup.
Both backends interrupt each thread 1000 times per second (of CPU-time) to apply the virtual speed-ups.
The difference between each backend is how the samples are recorded.
There are three key differences between the two backends:
the
perfbackend requires Linux Perf and elevated security priviledgesthe
perfbackend interrupts the application less frequently whereas thetimerbackend interrupts the application 1000 times per second of realtimethe
timerbackend has less accurate call stacks due to instruction pointer skid
In general, the perf backend is preferred over the timer backend when sufficient
security priviledges permit its usage.
If ROCPROFSYS_CAUSAL_BACKEND is set to auto, ROCm Systems Profiler falls back
to using the timer backend only if
the perf backend fails. If ROCPROFSYS_CAUSAL_BACKEND is
set to perf and using this backend fails, ROCm Systems Profiler aborts.
Instruction pointer skid#
Instruction pointer (IP) skid measures how many instructions run after the event of interest
before the program actually stops. The IP skid is calculated by subtracting
the location of the IP at the point of interest from the location of the IP
when the kernel finally stops the application.
For the timer backend, this translates to the
difference in the IP between when the timer generated a signal and when the
signal was actually generated. Although IP skid still occurs with the perf backend,
it is much more pronounced with the timer backend due to the overhead of pausing the entire thread.
This means the timer backend tends to have a lower resolution than the perf backend,
especially in line mode.
Installing Linux Perf#
Linux Perf is built into the kernel and may already be installed
(for instance, it is included in the default kernel for OpenSUSE).
The official method of checking whether Linux Perf is installed is
checking for the existence of the file
/proc/sys/kernel/perf_event_paranoid. If the file exists, the kernel has Perf installed.
If this file does not exist, as with Debian-based systems like Ubuntu, run the following command as superuser:
apt-get install linux-tools-common linux-tools-generic linux-tools-$(uname -r)
and reboot your computer. In order to use the perf backend, the value
of /proc/sys/kernel/perf_event_paranoid
should be less than or equal to 2. If the value in this file is greater than 2, you can’t
use the perf backend.
To update the paranoid level temporarily until the system is rebooted, run
one of the following commands
as a superuser (where PARANOID_LEVEL=<N> has a value of <N> in the range [-1, 2]):
echo ${PARANOID_LEVEL} | sudo tee /proc/sys/kernel/perf_event_paranoid
or
sysctl kernel.perf_event_paranoid=${PARANOID_LEVEL}
To make the paranoid level persistent after a reboot, add kernel.perf_event_paranoid=<N>
(where <N> is the desired paranoid level) to the /etc/sysctl.conf file.
Speed-up prediction variability and the rocprof-sys-causal executable#
Causal profiling typically requires running the application several times in
order to adequately sample all the code domains, experiment
with speed-ups and other techniques, and resolve statistical fluctuations.
The rocprof-sys-causal executable is designed to simplify this procedure:
$ rocprof-sys-causal --help
[rocprof-sys-causal] Usage: ./bin/rocprof-sys-causal [ --help (count: 0, dtype: bool)
--version (count: 0, dtype: bool)
--monochrome (max: 1, dtype: bool)
--debug (max: 1, dtype: bool)
--verbose (count: 1)
--config (min: 0, dtype: filepath)
--launcher (count: 1, dtype: executable)
--generate-configs (min: 0, dtype: folder)
--no-defaults (min: 0, dtype: bool)
--mode (count: 1, dtype: string)
--output-name (min: 1, dtype: filename)
--reset (max: 1, dtype: bool)
--end-to-end (max: 1, dtype: bool)
--wait (count: 1, dtype: seconds)
--duration (count: 1, dtype: seconds)
--iterations (count: 1, dtype: int)
--speedups (min: 0, dtype: integers)
--binary-scope (min: 0, dtype: integers)
--source-scope (min: 0, dtype: integers)
--function-scope (min: 0, dtype: regex-list)
--binary-exclude (min: 0, dtype: integers)
--source-exclude (min: 0, dtype: integers)
--function-exclude (min: 0, dtype: regex-list)
]
Causal profiling usually requires multiple runs to reliably resolve the speedup estimates.
This executable is designed to streamline that process.
For example (assume all commands end with \'-- <exe> <args>\'):
rocprof-sys-causal -n 5 -- <exe> # runs <exe> 5x with causal profiling enabled
rocprof-sys-causal -s 0 5,10,15,20 # runs <exe> 2x with virtual speedups:
# - 0
# - randomly selected from 5, 10, 15, and 20
rocprof-sys-causal -F func_A func_B func_(A|B) # runs <exe> 3x with the function scope limited to:
# 1. func_A
# 2. func_B
# 3. func_A or func_B
General tips:
- Insert progress points at hotspots in your code or use rocprof-sys\'s runtime instrumentation
- Note: binary rewrite will produce a incompatible new binary
- Run rocprof-sys-causal in "function" mode first (does not require debug info)
- Run rocprof-sys-causal in "line" mode when you are targeting one function (requires debug info)
- Preferably, use predictions from the "function" mode to determine which function to target
- Limit the virtual speedups to a smaller pool, e.g., 0,5,10,25,50, to get reliable predictions quicker
- Make use of the binary, source, and function scope to limit the functions/lines selected for experiments
- Note: source scope requires debug info
Options:
-h, -?, --help Shows this page
--version Prints the version and exit
[DEBUG OPTIONS]
--monochrome Disable colorized output
--debug Debug output
-v, --verbose Verbose output
[GENERAL OPTIONS]
-c, --config Base configuration file
-l, --launcher When running MPI jobs, rocprof-sys-causal needs to be *before* the executable which launches the MPI processes (i.e.
before `mpirun`, `srun`, etc.). Pass the name of the target executable (or a regex for matching to the name of the
target) for causal profiling, e.g., `rocprof-sys-causal -l foo -- mpirun -n 4 foo`. This ensures that the rocprof-sys
library is LD_PRELOADed on the proper target
-g, --generate-configs Generate config files instead of passing environment variables directly. If no arguments are provided, the config files
will be placed in ${PWD}/rocprof-sys-causal-config folder
--no-defaults Do not activate default features which are recommended for causal profiling. For example: PID-tagging of output files
and timestamped subdirectories are disabled by default. Kokkos tools support is added by default
(ROCPROFSYS_USE_KOKKOSP=ON) because, for Kokkos applications, the Kokkos-Tools callbacks are used for progress points.
Activation of OpenMP tools support is similar
[CAUSAL PROFILING OPTIONS (General)]
(These settings will be applied to all causal profiling runs)
-m, --mode [ function (func) | line ]
Causal profiling mode
-o, --output-name Output filename of causal profiling data w/o extension
-r, --reset Overwrite any existing experiment results during the first run
-e, --end-to-end Single causal experiment for the entire application runtime
-w, --wait Set the wait time (i.e. delay) before starting the first causal experiment (in seconds)
-d, --duration Set the length of time (in seconds) to perform causal experimentationafter the first experiment is started. Once this
amount of time has elapsed, no more causal experiments will be started but any currently running experiment will be
allowed to finish.
-n, --iterations Number of times to repeat the combination of run configurations
[CAUSAL PROFILING OPTIONS (Combinatorial)]
(Each individual argument to these options will multiply the number runs by the number of arguments and the number of
iterations. E.g. -n 2 -B "MAIN" -F "foo" "bar" will produce 4 runs: 2 iterations x 1 binary scope x 2 function scopes
(MAIN+foo, MAIN+bar, MAIN+foo, MAIN+bar))
-s, --speedups Pool of virtual speedups to sample from during experimentation. Each space designates a group and multiple speedups can
be grouped together by commas, e.g. -s 0 0,10,20-50 is two groups: group #1 is \'0\' and group #2 is \'0 10 20 25 30 35 40
45 50\'
-B, --binary-scope Restricts causal experiments to the binaries matching the list of regular expressions. Each space designates a group
and multiple scopes can be grouped together with a semi-colon
-S, --source-scope Restricts causal experiments to the source files or source file + lineno pairs (i.e. <file> or <file>:<line>) matching
the list of regular expressions. Each space designates a group and multiple scopes can be grouped together with a
semi-colon
-F, --function-scope Restricts causal experiments to the functions matching the list of regular expressions. Each space designates a group
and multiple scopes can be grouped together with a semi-colon
-BE, --binary-exclude Excludes causal experiments from being performed on the binaries matching the list of regular expressions. Each space
designates a group and multiple excludes can be grouped together with a semi-colon
-SE, --source-exclude Excludes causal experiments from being performed on the code from the source files or source file + lineno pair (i.e.
<file> or <file>:<line>) matching the list of regular expressions. Each space designates a group and multiple excludes
can be grouped together with a semi-colon
-FE, --function-exclude Excludes causal experiments from being performed on the functions matching the list of regular expressions. Each space
designates a group and multiple excludes can be grouped together with a semi-colon
Examples#
#!/bin/bash -e
module load rocprofiler-systems
N=20
I=3
# when providing speedups to rocprof-sys-causal, speedup
# groups are separated by a space so "0,10" results in
# one speedup group where rocprof-sys samples from
# the speedup set of {0, 10}. Passing "0 10" (without
# quotes to rocprof-sys-causal multiplies the
# number of runs by 2, where the first half of the
# runs instruct rocprof-sys to only use 0 as the
# speedup and the second half of the runs instruct
# rocprof-sys to only use 10 as the speedup.
SPEEDUPS="0,0,0,10,20,30,40,50,50,75,75,75,90,90,90"
# thus, -s ${SPEEDUPS} only multiplies the number
# of runs by 1 whereas -S ${SPEEDUPS_E2E} multiplies
# the number of runs by 15:
# - 3 runs with speedup of 0
# - 1 run for each of the speedups 10, 20, 30, and 40
# - 2 runs with speedup of 50
# - 3 runs with speedup of 75
# - 3 runs with speedup of 90
SPEEDUPS_E2E=$(echo "${SPEEDUPS}" | sed \'s/,/ /g\')
# 20 iterations in function mode with 1 speedup group
# and source scope set to .cpp files
#
# outputs to files:
# - causal/experiments.func.coz
# - causal/experiments.func.json
#
# total executions: 20
#
rocprof-sys-causal \
-n ${N} \
-s ${SPEEDUPS} \
-m function \
-o experiments.func \
-S ".*\\.cpp" \
-- \
./causal-rocprofsys-cpu "${@}"
# 20 iterations in line mode with 1 speedup group
# and source scope restricted to lines 100 and 110
# in the causal.cpp file.
#
# outputs to files:
# - causal/experiments.line.coz
# - causal/experiments.line.json
#
# total executions: 20
#
rocprof-sys-causal \
-n ${N} \
-s ${SPEEDUPS} \
-m line \
-o experiments.line \
-S "causal\\.cpp:(100|110)" \
-- \
./causal-rocprofsys-cpu "${@}"
# 3 iterations in function mode of 15 singular speedups
# in end-to-end mode with 2 different function scopes
# where one is restricted to "cpu_slow_func" and
# another is restricted to "cpu_fast_func".
#
# outputs to files:
# - causal/experiments.func.e2e.coz
# - causal/experiments.func.e2e.json
#
# total executions: 90
#
rocprof-sys-causal \
-n ${I} \
-s ${SPEEDUPS_E2E} \
-m func \
-e \
-o experiments.func.e2e \
-F "cpu_slow_func" \
"cpu_fast_func" \
-- \
./causal-rocprofsys-cpu "${@}"
# 3 iterations in line mode of 15 singular speedups
# in end-to-end mode with 2 different source scopes
# where one is restricted to line 100 in causal.cpp
# and another is restricted to line 110 in causal.cpp.
#
# outputs to files:
# - causal/experiments.line.e2e.coz
# - causal/experiments.line.e2e.json
#
# total executions: 90
#
rocprof-sys-causal \
-n ${I} \
-s ${SPEEDUPS_E2E} \
-m line \
-e \
-o experiments.line.e2e \
-S "causal\\.cpp:100" \
"causal\\.cpp:110" \
-- \
./causal-rocprofsys-cpu "${@}"
export OMP_NUM_THREADS=8
export OMP_PROC_BIND=spread
export OMP_PLACES=threads
# set number of iterations to 5
N=5
# 5 iterations in function mode of 1 speedup
# group with the source scope restricted
# to files containing "lulesh" in their filename
# and exclude functions which start with "Kokkos::"
# or "std::enable_if".
#
# outputs to files:
# - causal/experiments.func.coz
# - causal/experiments.func.json
#
# total executions: 5
#
# First of 5 executions overwrites any
# existing causal/experiments.func.(coz|json)
# file due to "--reset" argument
#
rocprof-sys-causal \
--reset \
-n ${N} \
-s ${SPEEDUPS} \
-m func \
-o experiments.func \
-S "lulesh.*" \
-FE "^(Kokkos::|std::enable_if)" \
-- \
./lulesh-rocprofsys -i 50 -s 200 -r 20 -b 5 -c 5 -p
# 5 iterations in line mode of 1 speedup
# group with the source scope restricted
# to files containing "lulesh" in their filename
# and exclude functions which start with "exec_range"
# or "execute" and which contain either
# "construct_shared_allocation" or "._omp_fn." in
# the function name.
#
# outputs to files:
# - causal/experiments.line.coz
# - causal/experiments.line.json
#
# total executions: 5
#
# First of 5 executions overwrites any
# existing causal/experiments.line.(coz|json)
# file due to "--reset" argument
#
rocprof-sys-causal \
--reset \
-n ${N} \
-s ${SPEEDUPS} \
-m line \
-o experiments.line \
-S "lulesh.*" \
-FE "^(exec_range|execute);construct_shared_allocation;\\._omp_fn\\." \
-- \
./lulesh-rocprofsys -i 50 -s 200 -r 20 -b 5 -c 5 -p
# 5 iterations in line mode of 1 speedup
# group with the source scope restricted
# to files whose basename is "lulesh.cc"
# for 3 different functions:
# - ApplyMaterialPropertiesForElems
# - CalcHourglassControlForElems
# - CalcVolumeForceForElems
#
# outputs to files:
# - causal/experiments.line.targeted.coz
# - causal/experiments.line.targeted.json
#
# total executions: 15
#
# First of 5 executions overwrites any
# existing causal/experiments.line.(coz|json)
# file due to "--reset" argument
#
rocprof-sys-causal \
--reset \
-n ${N} \
-s ${SPEEDUPS} \
-m line \
-o experiments.line.targeted \
-F "ApplyMaterialPropertiesForElems" \
"CalcHourglassControlForElems" \
"CalcVolumeForceForElems" \
-S "lulesh\\.cc" \
-- \
./lulesh-rocprofsys -i 50 -s 200 -r 20 -b 5 -c 5 -p
Using rocprof-sys-causal with other launchers like mpirun#
The rocprof-sys-causal executable is intended to assist with application replay
and is designed to always be at the start of the command line as the primary process.
rocprof-sys-causal typically adds a LD_PRELOAD of the ROCm Systems Profiler libraries
into the environment before launching the command to inject the functionality
required to start the causal profiling tooling. However, this is problematic
when the target application for causal profiling uses a launcher, in which case
it is listed as an argument rather than as the main application. For example,
foo is the target application for profiling, but the command to run it is
mpirun -n 2 foo. Running the command rocprof-sys-causal -- mpirun -n 2 foo
applies the causal profiling to mpirun instead of foo.
rocprof-sys-causal remedies this by providing a command-line option -l` / `--launcher
to indicate the target application is using a launcher script/executable. The
argument to the command-line option is the name of, or regular expression for, the target application
on the command line. When --launcher is used, rocprof-sys-causal generates
all the replay configurations and runs them but delays adding the LD_PRELOAD. Instead it
inserts a call to itself into the command line right before the target
application. This recursive call inherits the configuration from
the parent rocprof-sys-causal executable, inserts an LD_PRELOAD into the environment,
and calls execv to replace itself with the new process launched by the target
application.
In other words, the following command:
rocprof-sys-causal -l foo -n 3 -- mpirun -n 2 foo`
Effectively results in:
mpirun -n 2 rocprof-sys-causal -- foo
mpirun -n 2 rocprof-sys-causal -- foo
mpirun -n 2 rocprof-sys-causal -- foo
Visualizing the causal output#
ROCm Systems Profiler generates causal/experiments.json and causal/experiments.coz in
${ROCPROFSYS_OUTPUT_PATH}/${ROCPROFSYS_OUTPUT_PREFIX}. Visit
plasma-umass.org/coz to open the *.coz file.
ROCm Systems Profiler versus Coz#
This comparison is intended for readers who are familiar with the Coz profiler. ROCm Systems Profiler provides several additional features and utilities for causal profiling:
Feature |
Coz |
ROCm Systems Profiler |
Notes |
|---|---|---|---|
Debug info |
requires debug info in DWARF v3 format ( |
optional, supports any DWARF format version |
See Note #1 below |
Experiment selection |
|
|
See Note #2 below |
Experiment speed-ups |
Randomly samples b/t 0..100 in increments of 5 or one fixed speed-up |
Supports specifying smaller subset |
See Note #3 below |
Scope options |
Supports binary and source scopes |
Supports binary, source, and function scopes |
See Note #4, #5, and #6 below |
Scope inclusion |
Uses |
Full regex support for binary, source, and function scopes |
|
Scope exclusion |
Not supported |
Supports regexes for excluding binary/source/function |
See Note #7 below |
Call-stack sampling |
Linux Perf |
Linux Perf, libunwind |
See Note #8 below |
Note
ROCm Systems Profiler supports a “function” mode which does not require debug info.
ROCm Systems Profiler supports selecting an entire range of instruction pointers for a function instead of an instruction pointer for one line. In large code bases, “function” mode can resolve in fewer iterations. After a target function is identified, you can switch to line mode and limit the function scope to the target function.
ROCm Systems Profiler supports randomly sampling from subsets, e.g. { 0, 0, 5, 10 } where 0% is randomly selected 50% of time and 5% and 10% are randomly selected 25% of the time.
ROCm Systems Profiler and COZ have the same definition for binary scope, which is the binaries loaded at runtime (the executable and linked libraries).
ROCm Systems Profiler “source scope” supports both
<file>and<file>:<line>formats in contrast to the COZ “source scope” which requires<file>:<line>format.ROCm Systems Profiler supports a “function” scope which narrows the function and lines which are eligible for causal experiments to those within the matching functions.
ROCm Systems Profiler supports a second filter on scopes for removing binary/source/function caught by an inclusive match. For example
BINARY_SCOPE=.*andBINARY_EXCLUDE=libmpi.*initially includes all binaries but exclude regex removes MPI libraries.In ROCm Systems Profiler, the Linux Perf backend is preferred over use libunwind. However, Linux Perf usage can be restricted for security reasons. ROCm Systems Profiler falls back to using a second POSIX timer and libunwind if Linux Perf is not available.