What is rocBLAS#
Introduction#
rocBLAS is the AMD library for Basic Linear Algebra Subprograms (BLAS) on the ROCm platform. It is implemented in the HIP programming language and optimized for AMD GPUs.
The aim of rocBLAS is to provide:
Functionality similar to legacy BLAS, adapted to run on GPUs
High-performance robust implementation
rocBLAS is written in C++17 and HIP, and uses the AMD ROCm runtime to run on GPU devices.
The rocBLAS API is a thin C99 API using the Hourglass Pattern. It contains:
rocBLAS Level-1 Functions, rocBLAS Level-2 functions, and rocBLAS Level-3 functions with batched and strided_batched versions
Extensions to legacy BLAS, including functions for mixed precision
Auxiliary functions
Device Memory functions
Note
The official rocBLAS API is the C99 API defined in
rocblas.h, therefore the use of any other public symbols is discouraged. All other C/C++ interfaces may not follow a deprecation model and so can change without warning from one release to the next.rocBLAS array storage format is column major and one based. This is to maintain compatibility with the Legacy BLAS code, which is written in Fortran.
rocBLAS calls the AMD Tensile library for Level 3 BLAS matrix multiplication.
Use of Tensile#
The rocBLAS library internally uses Tensile, which supplies the high-performance implementation of GEMM. It is installed as part of the rocBLAS package. rocBLAS uses CMake for build automation, and CMake downloads Tensile during library configuration and automatically configures it as part of the build, so no further action is required by the user to set it up. No external facing API for Tensile is provided.
rocBLAS API and legacy BLAS functions#
rocBLAS is initialized by calling rocblas_create_handle, and it is terminated by calling rocblas_destroy_handle. The rocblas_handle is persistent and contains:
HIP stream
Temporary device workspace
Mode for enabling or disabling logging (default is logging disabled)
rocBLAS functions run on the host, and they call HIP to launch rocBLAS kernels that run on the device in a HIP stream. The kernels are asynchronous unless:
The function returns a scalar result from device to host
Temporary device memory is allocated
In both cases above, the launch can be made asynchronous by:
Use
rocblas_pointer_mode_deviceto keep the scalar result on the device. Note that only the following Level1 BLAS functions that return a scalar result:Xdot,Xdotu,Xnrm2,Xasum,iXamax,iXamin.Use the provided device memory functions to allocate device memory that persists in the handle. Note that most rocBLAS functions do not allocate temporary device memory.
Before calling a rocBLAS function, arrays must be copied to the device. Integer scalars like m, n, k are stored on the host. Floating point scalars like alpha and beta can be on host or device.
Error handling is by returning a rocblas_status. Functions conform to the legacy BLAS argument checking.
Rules for obtaining rocBLAS API from legacy BLAS functions#
The legacy BLAS routine name is changed to lowercase and prefixed by
rocblas_<function>. For example the legacy BLAS routineSSCALwhich scales a vector by a constant value, is replaced withrocblas_sscal.A first argument
rocblas_handlehandle is added to all rocBLAS functions.Input arguments are declared with the
constmodifier.Character arguments are replaced with enumerated types defined in
rocblas_types.h. They are passed by value on the host.Array arguments are passed by reference on the device.
Scalar arguments are passed by value on the host with the following exceptions. See the section Pointer Mode for more information on these exceptions:
Scalar values alpha and beta are passed by reference on either the host or the device.
Where Legacy BLAS functions have return values, the return value is instead added as the last function argument. It is returned by reference on either the host or the device. This applies to the following functions:
xDOT,xDOTU,xNRM2,xASUM,IxAMAX,IxAMIN.
The return value of all functions is
rocblas_status, defined inrocblas_types.h. It is used to check for errors.
rocBLAS Example Code#
Below is a simple example for calling function rocblas_sscal:
#include <iostream>
#include <vector>
#include "hip/hip_runtime_api.h"
#include "rocblas.h"
using namespace std;
int main()
{
rocblas_int n = 10240;
float alpha = 10.0;
vector<float> hx(n);
vector<float> hz(n);
float* dx;
rocblas_handle handle;
rocblas_create_handle(&handle);
// allocate memory on device
hipMalloc(&dx, n * sizeof(float));
// Initial Data on CPU,
srand(1);
for( int i = 0; i < n; ++i )
{
hx[i] = rand() % 10 + 1; //generate a integer number between [1, 10]
}
// copy array from host memory to device memory
hipMemcpy(dx, hx.data(), sizeof(float) * n, hipMemcpyHostToDevice);
// call rocBLAS function
rocblas_status status = rocblas_sscal(handle, n, &alpha, dx, 1);
// check status for errors
if(status == rocblas_status_success)
{
cout << "status == rocblas_status_success" << endl;
}
else
{
cout << "rocblas failure: status = " << status << endl;
}
// copy output from device memory to host memory
hipMemcpy(hx.data(), dx, sizeof(float) * n, hipMemcpyDeviceToHost);
hipFree(dx);
rocblas_destroy_handle(handle);
return 0;
}
LP64 Interface#
The rocBLAS library default implementations are LP64, so rocblas_int arguments are 32 bit and
rocblas_stride arguments are 64 bit.
ILP64 Interface#
The rocBLAS library Level-1 functions are also provided with ILP64 interfaces. With these interfaces all rocblas_int arguments are replaced by the typename
int64_t. These ILP64 function names all end with a suffix _64. The only output arguments that change are for the
xMAX and xMIN for which the index is now int64_t. Performance should match the LP64 API when problem sizes don’t require the additional
precision. Function level documentation is not repeated for these API as they are identical in behavior to the LP64 versions,
however functions which support this alternate API include the line:
This function supports the 64-bit integer interface (ILP64).
Column-major Storage and 1 Based Indexing#
rocBLAS uses column-major storage for 2D arrays, and 1-based indexing
for the functions xMAX and xMIN. This is the same as legacy BLAS and
cuBLAS.
If you need row-major and 0-based indexing (used in C language arrays), download the file cblas.tgz from the Netlib Repository.
Look at the CBLAS functions that provide a thin interface to legacy BLAS. They convert from row-major, 0 based, to column-major, 1
based. This is done by swapping the order of function arguments. It is not necessary to transpose matrices.
Pointer Mode#
The auxiliary functions rocblas_set_pointer and rocblas_get_pointer are
used to set and get the value of the state variable
rocblas_pointer_mode. This variable is stored in rocblas_handle. If rocblas_pointer_mode ==
rocblas_pointer_mode_host, then scalar parameters must be allocated on
the host. If rocblas_pointer_mode == rocblas_pointer_mode_device, then
scalar parameters must be allocated on the device.
There are two types of scalar parameter:
Scaling parameters like alpha and beta used in functions like
axpy,gemv,gemm 2Scalar results from functions
amax,amin,asum,dot,nrm2
For scalar parameters like alpha and beta when rocblas_pointer_mode ==
rocblas_pointer_mode_host, they can be allocated on the host heap or
stack. The kernel launch is asynchronous, and if they are on the heap,
they can be freed after the return from the kernel launch. When
rocblas_pointer_mode == rocblas_pointer_mode_device they must not be
changed till the kernel completes.
For scalar results, when rocblas_pointer_mode ==
rocblas_pointer_mode_host, then the function blocks the CPU till the GPU
has copied the result back to the host. When rocblas_pointer_mode ==
rocblas_pointer_mode_device the function will return after the
asynchronous launch. Similarly to vector and matrix results, the scalar
result is only available when the kernel has completed execution.
Asynchronous API#
rocBLAS functions will be asynchronous unless:
The function needs to allocate device memory
The function returns a scalar result from GPU to CPU
The order of operations in the asynchronous functions is as in the figure below. The argument checking, calculation of process grid, and kernel launch take very little time. The asynchronous kernel running on the GPU does not block the CPU. After the kernel launch, the CPU keeps processing the next instructions.
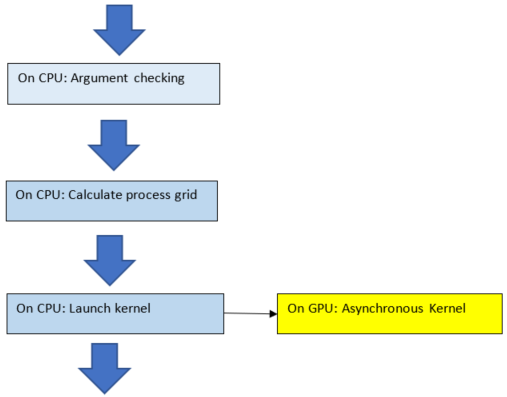
Fig. 1 Order of operations in asynchronous functions#
The above order of operations will change if there is logging or the function is synchronous. Logging requires system calls, and the program must wait for them to complete before executing the next instruction. See the Logging section for more information.
Note
The default is no logging.
If the CPU needs to allocate device memory, it must wait until memory allocation is complete before executing the next instruction. For more detailed information, refer to sections Device Memory Allocation in rocBLAS and Device Memory Allocation.
Note
Memory can be pre-allocated. This will make the function asynchronous, as it removes the need for the function to allocate memory.
The following functions copy a scalar result from GPU to CPU if
rocblas_pointer_mode == rocblas_pointer_mode_host: asum, dot, max, min, nrm2.
This makes the function synchronous, as the program must wait for the copy before executing the next instruction. See Pointer Mode for more information.
Note
Set rocblas_pointer_mode == rocblas_pointer_mode_device makes the function asynchronous by keeping the result on the GPU.
The order of operations with logging, device memory allocation, and return of a scalar result is as in the figure below:
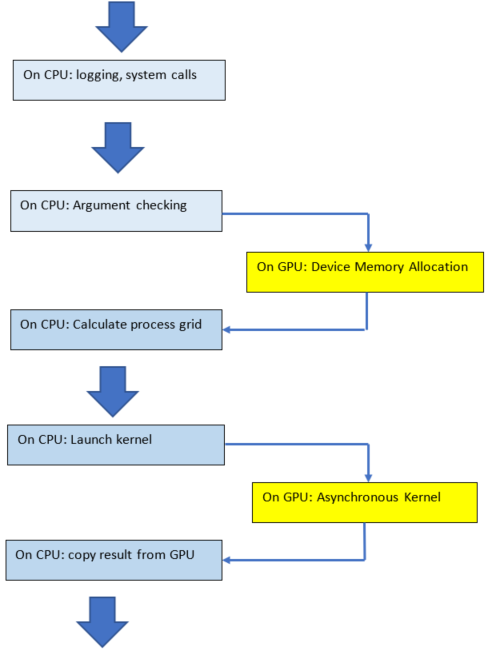
Fig. 2 Code blocks in synchronous function call#
Kernel launch status error checking#
The function hipPeekAtLastError() is called before and after rocblas kernel launches. This will detect if launch parameters are incorrect, for example
invalid work-group or thread block sizes. It will also detect if the kernel code can not run on the current GPU device (returns rocblas_status_arch_mismatch).
Note that hipPeekAtLastError() does not flush the last error. Reporting only a change in hipPeekAtLastError() as a detection system has the disadvantage
that if the previous last error from another kernel launch or hip call is the same as the error from the current kernel, then no error is reported.
Only the first error would be reported in this case. You can avoid this behaviour by flushing any previous hip error before calling a rocBLAS function
by calling hipGetLastError(). Note that both hipPeekAtLastError() and hipGetLastError() run synchronously on the CPU and they only check the kernel
launch, not the asynchronous work done by the kernel. We do not clear the last error in case the caller was relying on it for detecting errors in
a batch of hip and rocBLAS function calls.
Complex Number Data Types#
Data types for rocBLAS complex numbers in the API are a special case. For C compiler users, gcc, and other non-hipcc compiler users, these types are exposed as a struct with x and y components and identical memory layout to std::complex for float and double precision. Internally a templated C++ class is defined, but it should be considered deprecated for external use. For simplified usage with Hipified code there is an option to interpret the API as using hipFloatComplex and hipDoubleComplex types (i.e. typedef hipFloatComplex rocblas_float_complex). This is provided for users to avoid casting when using the hip complex types in their code. As the memory layout is consistent across all three types, it is safe to cast arguments to API calls between the 3 types: hipFloatComplex, std::complex<float>, and rocblas_float_complex, as well as for the double precision variants. To expose the API as using the hip defined complex types, user can use either a compiler define or inlined #define ROCM_MATHLIBS_API_USE_HIP_COMPLEX before including the header file <rocblas.h>. Thus the API is compatible with both forms, but recompilation is required to avoid casting if switching to pass in the hip complex types. Most device memory pointers are passed with void* types to hip utility functions (e.g. hipMemcpy), so uploading memory from std::complex arrays or hipFloatComplex arrays requires no changes regardless of complex data type API choice.
Atomic Operations#
Some functions within the rocBLAS library such as gemv, symv, trsv, trsm, and gemm may use atomic operations to increase performance.
By using atomics, functions may not give bit-wise reproducible results. Differences between multiple runs should not be significant and will
remain accurate, but if users require identical results across multiple runs, atomics should be turned off. See rocblas_atomics_mode,
rocblas_set_atomics_mode(), and rocblas_get_atomics_mode().
In addition to the above API, rocBLAS also provides an environment variable ROCBLAS_DEFAULT_ATOMICS_MODE, which allows users to set the default atomics mode during the creation of rocblas_handle.
rocblas_set_atomics_mode() has higher precedence and users can use the API in the application to override the configuration set via the environment variable.
ROCBLAS_DEFAULT_ATOMICS_MODE = 0: To set the default to berocblas_atomics_not_allowedROCBLAS_DEFAULT_ATOMICS_MODE = 1: To set the atomics to berocblas_atomics_allowed
Bitwise Reproducibility#
By default rocBLAS may use atomic operations to achieve better performance in some functions. To ensure bitwise reproducible results, where users require identical results across multiple runs, the following functions require atomics to be disabled
Functions using atomic operations#
Note
Functions such as GEMV and TRSM uses temporary device memory to use optimized kernels to achieve higher performance.
If device memory is unavailable, the functions will proceed to use an unoptimized kernel, this could also produce variable results.
Users will be notified if the kernel used is unoptimized by returning rocblas_status_perf_degraded status.
All other functions except the above-mentioned are bitwise reproducible by default.
MI100 (gfx908) Considerations#
On nodes with the MI100 (gfx908), MFMA (Matrix-Fused-Multiply-Add) instructions are available to substantially speed up matrix operations. This hardware feature is used in all gemm and gemm-based functions in rocBLAS with 32-bit or shorter base datatypes with an associated 32-bit compute_type (f32_r, i32_r, or f32_c as appropriate).
Specifically, rocBLAS takes advantage of MI100’s MFMA instructions for three real base types f16_r, bf16_r, and f32_r with compute_type f32_r, one integral base type i8_r with compute_type i32_r, and one complex base type f32_c with compute_type f32_c. In summary, all GEMM APIs and APIs for GEMM-based functions using these five base types and their associated compute_type (explicit or implicit) take advantage of MI100’s MFMA instructions.
Note
The use of MI100’s MFMA instructions is automatic. There is no user control for on/off.
Not all problem sizes may select MFMA-based kernels; additional tuning may be needed to get good performance.
MI200 (gfx90a) Considerations#
On nodes with the MI200 (gfx90a), MFMA_F64 instructions are available to
substantially speed up double precision matrix operations. This
hardware feature is used in all GEMM and GEMM-based functions in
rocBLAS with 64-bit floating-point datatype, namely DGEMM, ZGEMM,
DTRSM, ZTRSM, DTRMM, ZTRMM, DSYRKX, and ZSYRKX.
The MI200 MFMA_F16, MFMA_BF16 and MFMA_BF16_1K instructions
flush subnormal input/output data (“denorms”) to zero. It is observed that
certain use cases utilizing the HPA (High Precision Accumulate) HGEMM
kernels where a_type=b_type=c_type=d_type=f16_r and compute_type=f32_r
do not tolerate the MI200’s flush-denorms-to-zero behavior well
due to F16’s limited exponent range. An alternate implementation of the
HPA HGEMM kernel utilizing the MFMA_BF16_1K instruction is provided which,
takes advantage of BF16’s much larger exponent range, albeit with reduced
accuracy. To select the alternate implementation of HPA HGEMM with the
gemm_ex/gemm_strided_batched_ex functions, for the flags argument, use
the enum value of rocblas_gemm_flags_fp16_alt_impl.
Note
The use of MI200’s MFMA instructions (including MFMA_F64) is automatic. There is no user control for on/off.
Not all problem sizes may select MFMA-based kernels; additional tuning may be needed to get good performance.