Library Source Code Organization#
Library Source Code Organization#
The rocALUTION library is split into three major parts:
The src/base/ directory contains all source code that is built on top of the
BaseRocalutionobject as well as the backend structure.src/solvers/ contains all solvers, preconditioners and its control classes.
In src/utils/ memory (de)allocation, logging, communication, timing and math helper functions are placed.
The src/base/ directory#
Backend Manager#
The support of accelerator devices is embedded in the structure of rocALUTION. The primary goal is to use this technology whenever possible to decrease the computational time.
Each technology has its own backend implementation, dealing with platform specific initialization, synchronization, reservation, etc. functionality. Currently available backends are for CPU (naive, OpenMP, MPI) and GPU (HIP).
Note
Not all functions are ported and present on the accelerator backend. This limited functionality is natural, since not all operations can be performed efficiently on the accelerators (e.g. sequential algorithms, I/O from the file system, etc.).
The Operator and Vector classes#
The Operator and Vector classes and its derived local and global classes, are the classes available by the rocALUTION API.
While granting the user access to all relevant functionality, all hardware relevant implementation details are hidden.
Those linear operators and vectors are the main objects in rocALUTION.
They can be moved to an accelerator at run time.
The linear operators are defined as local or global matrices (i.e. on a single node or distributed/multi-node) and local stencils (i.e. matrix-free linear operations). The only template parameter of the operators and vectors is the data type (ValueType). Fig. 1 gives an overview of supported operators and vectors.
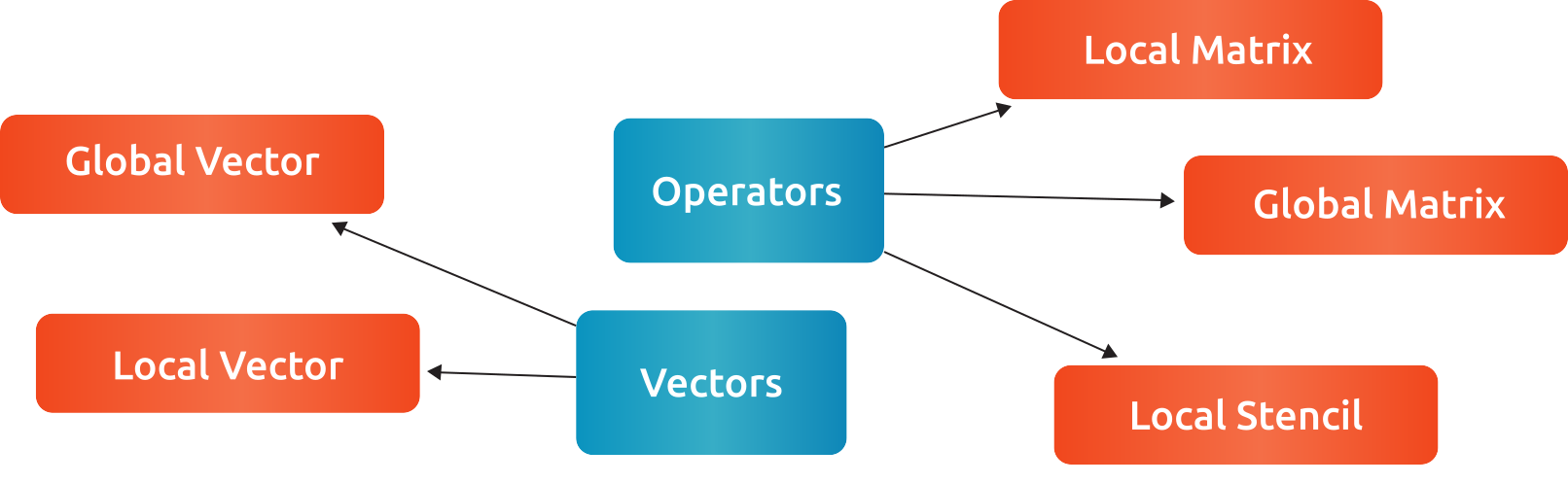
Fig. 1 Operator and vector classes.#
Each of the objects contain a local copy of the hardware descriptor created by the init_rocalution function.
Additionally, each local object that is derived from an operator or vector, contains a pointer to a Base-class, a Host-class and an Accelerator-class of same type (e.g. a LocalMatrix contains pointers to a BaseMatrix, HostMatrix and AcceleratorMatrix).
The Base-class pointer will always point towards either the Host-class or the Accelerator-class pointer, dependend on the runtime decision of the local object.
Base-classes and their derivatives are further explained in The BaseMatrix and BaseVector classes.
Furthermore, each global object, derived from an operator or vector, embeds two Local-classes of same type to store the interior and ghost part of the global object (e.g. a GlobalVector contains two LocalVector).
For more details on distributed data structures, see the user manual.
The BaseMatrix and BaseVector classes#
The data is an object, pointing to the BaseMatrix class. The pointing is coming from either a HostMatrix or an AcceleratorMatrix. The AcceleratorMatrix is created by an object with an implementation in the backend and a matrix format. Switching between host and accelerator matrices is performed in the LocalMatrix class. The LocalVector is organized in the same way.
Each matrix format has its own class for the host and for the accelerator backend. All matrix classes are derived from the BaseMatrix, which provides the base interface for computation as well as for data accessing.
Each local object contains a pointer to a Base-class object.
While the Base-class is mainly pure virtual, their derivatives implement all platform specific functionality.
Each of them is coupled to a rocALUTION backend descriptor.
While the HostMatrix, HostStencil and HostVector classes implements all host functionality, AcceleratorMatrix, AcceleratorStencil and AcceleratorVector contain accelerator related device code.
Each of the backend specializations are located in a different directory, e.g. src/base/host for host related classes and src/base/hip for accelerator / HIP related classes.
ParallelManager#
The parallel manager class handles the communication and the mapping of the global operators. Each global operator and vector need to be initialized with a valid parallel manager in order to perform any operation. For many distributed simulations, the underlying operator is already distributed. This information need to be passed to the parallel manager. All communication functionality for the implementation of global algorithms is available in the rocALUTION communicator in src/utils/communicator.hpp. For more details on distributed data structures, see the user manual.
The src/solvers/ directory#
The Solver and its derived classes can be found in src/solvers.
The directory structure is further split into the sub-classes DirectLinearSolver in src/solvers/direct, IterativeLinearSolver in src/solvers/krylov, BaseMultiGrid in src/solvers/multigrid and Preconditioner in src/solvers/preconditioners.
Each of the solver is using an Operator, Vector and data type as template parameters to solve a linear system of equations.
The actual solver algorithm is implemented by the Operator and Vector functionality.
Most of the solvers can be performed on linear operators, e.g. LocalMatrix, LocalStencil and GlobalMatrix - i.e. the solvers can be performed locally (on a shared memory system) or in a distributed manner (on a cluster) via MPI.
All solvers and preconditioners need three template parameters - Operators, Vectors and Scalar type.
The Solver class is purely virtual and provides an interface for
SetOperatorto set the operator, i.e. the user can pass the matrix here.Buildto build the solver (including preconditioners, sub-solvers, etc.). The user need to specify the operator first before building the solver.Solveto solve the sparse linear system. The user need to pass a right-hand side and a solution / initial guess vector.Printto show solver information.ReBuildNumericto only re-build the solver numerically (if possible).MoveToHostandMoveToAcceleratorto offload the solver (including preconditioners and sub-solvers) to the host / accelerator.

Fig. 2 Solver and preconditioner classes.#
The src/utils/ directory#
In the src/utils directory, all commonly used host (de)allocation, timing, math, communication and logging functionality is gathered.
Furthermore, the rocALUTION IndexType2, which is the indexing type for global, distributed structures, can be adjusted in src/utils/types.hpp. By default, rocALUTION uses 64-bit wide global indexing.
Note
It is not recommended to switch to 32-bit global indexing.
In src/utils/def.hpp
verbosity level VERBOSE_LEVEL can be adjusted, see Verbose Output,
debug mode DEBUG_MODE can be enabled, see Debug Output,
MPI logging LOG_MPI_RANK can be modified, see Verbose Output and MPI,
and object tracking OBJ_TRACKING_OFF can be enabled, see Automatic Object Tracking.