MIVisionX samples documentation#
MIVisionX samples using OpenVX and OpenVX extensions. In the samples below you will learn how to run computer vision, inference, and a combination of computer vision & inference efficiently on target hardware.
GDF - Graph Description Format#
MIVisionX samples using RunVX
To run the samples you need to put MIVisionX executables and libraries into the system path:
export PATH=$PATH:/opt/rocm/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib
To get help on the runvx utility use the -h option:
runvx -h
skintonedetect.gdf#
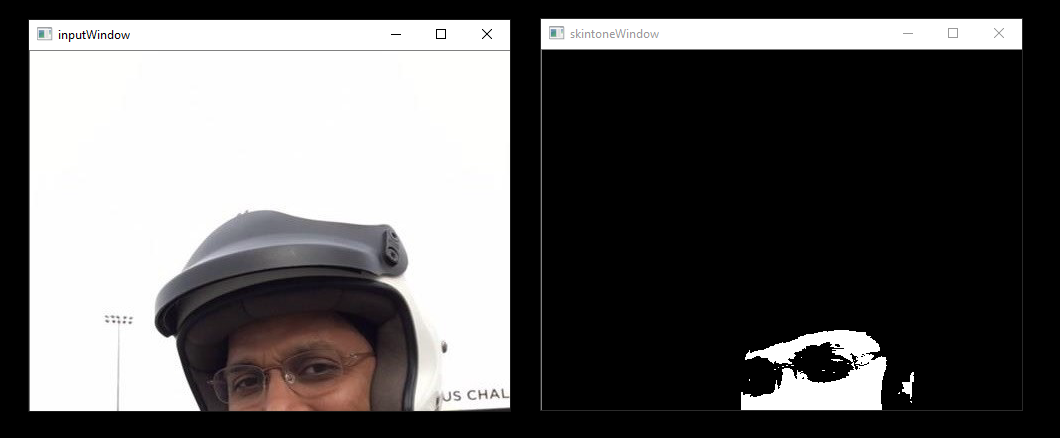
runvx gdf/skintonedetect.gdf
Or, when using a live camera:
runvx -frames:live gdf/skintonedetect-LIVE.gdf
canny.gdf#
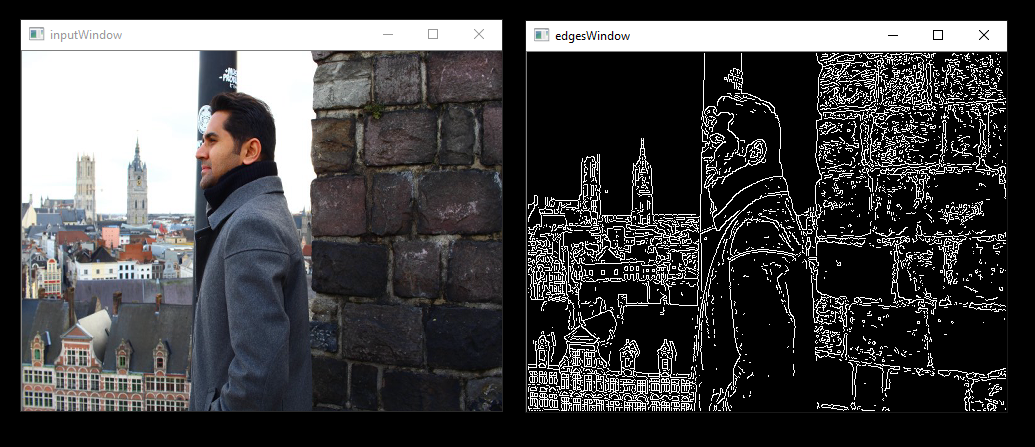
runvx gdf/canny.gdf
Or, when using a live camera:
runvx -frames:live gdf/canny-LIVE.gdf
OpenCV_orb-LIVE.gdf#
Using a live camera:
runvx -frames:live gdf/OpenCV_orb-LIVE.gdf
C/C++ Samples for OpenVX and OpenVX Extensions#
MIVisionX samples in C/C++
Canny#
cd c_samples/canny/
cmake .
make
./cannyDetect --image <imageName>
./cannyDetect --live
Orb Detect#
cd c_samples/opencv_orb/
cmake .
make
./orbDetect
Radeon Loom 360 Stitch Samples#
MIVisionX samples using LoomShell

To run the samples you need to put MIVisionX executables and libraries into the system path:
export PATH=$PATH:/opt/rocm/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib
To get help on the loom_shell utility use the -help option:
loom_shell -help
Sample #1#
Get data for the stitch:
cd loom_360_stitch/sample-1/
python loomStitch-sample1-get-data.py
Run loom_shell script to generate the 360 image:
loom_shell loomStitch-sample1.txt
Expected Output:
loom_shell loomStitch-sample1.txt
loom_shell 0.9.8 [loomsl 0.9.8]
... processing commands from loomStitch-sample1.txt
..ls_context context[1] created
..lsCreateContext: created context context[0]
..lsSetOutputConfig: successful for context[0]
..lsSetCameraConfig: successful for context[0]
OK: OpenVX using GPU device#0 (gfx906+sram-ecc) [OpenCL 2.0 ] [SvmCaps 0 0]
..lsInitialize: successful for context[0] (1380.383 ms)
..cl_mem mem[2] created
..cl_context opencl_context[1] created
..lsGetOpenCLContext: get OpenCL context opencl_context[0] from context[0]
OK: loaded cam00.bmp
OK: loaded cam01.bmp
OK: loaded cam02.bmp
OK: loaded cam03.bmp
..lsSetCameraBuffer: set OpenCL buffer mem[0] for context[0]
..lsSetOutputBuffer: set OpenCL buffer mem[1] for context[0]
OK: run: executed for 100 frames
OK: run: Time: 0.919 ms (min); 1.004 ms (avg); 1.238 ms (max); 1.212 ms (1st-frame) of 100 frames
OK: created LoomOutputStitch.bmp
> stitch graph profile
COUNT,tmp(ms),avg(ms),min(ms),max(ms),DEV,KERNEL
100, 0.965, 1.005, 0.918, 1.237,CPU,GRAPH
100, 0.959, 0.999, 0.915, 1.234,GPU,com.amd.loomsl.warp
100, 0.955, 0.994, 0.908, 1.232,GPU,com.amd.loomsl.merge
OK: OpenCL buffer usage: 324221600, 9/9
..lsReleaseContext: released context context[0]
... exit from loomStitch-sample1.txt
Note
The stitched output image is saved as LoomOutputStitch.bmp
Sample #2#
Get data for the stitch:
cd loom_360_stitch/sample-2/
python loomStitch-sample2-get-data.py
Run loom_shell script to generate the 360 image:
loom_shell loomStitch-sample2.txt
Sample #3#
Get data for the stitch:
cd loom_360_stitch/sample-3/
python loomStitch-sample3-get-data.py
Run loom_shell script to generate the 360 image:
loom_shell loomStitch-sample3.txt
Model Compiler Efficient Inference#
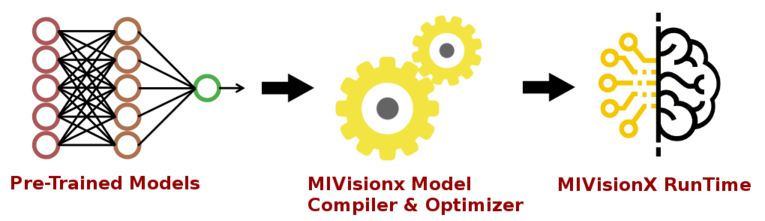
The sample applications available in samples/model_compiler_samples, demonstrate how to run inference efficiently using AMD’s open source implementation of OpenVX and OpenVX extensions. The samples review each step required to convert a pre-trained neural net model into an OpenVX graph and run this graph efficiently on the target hardware.
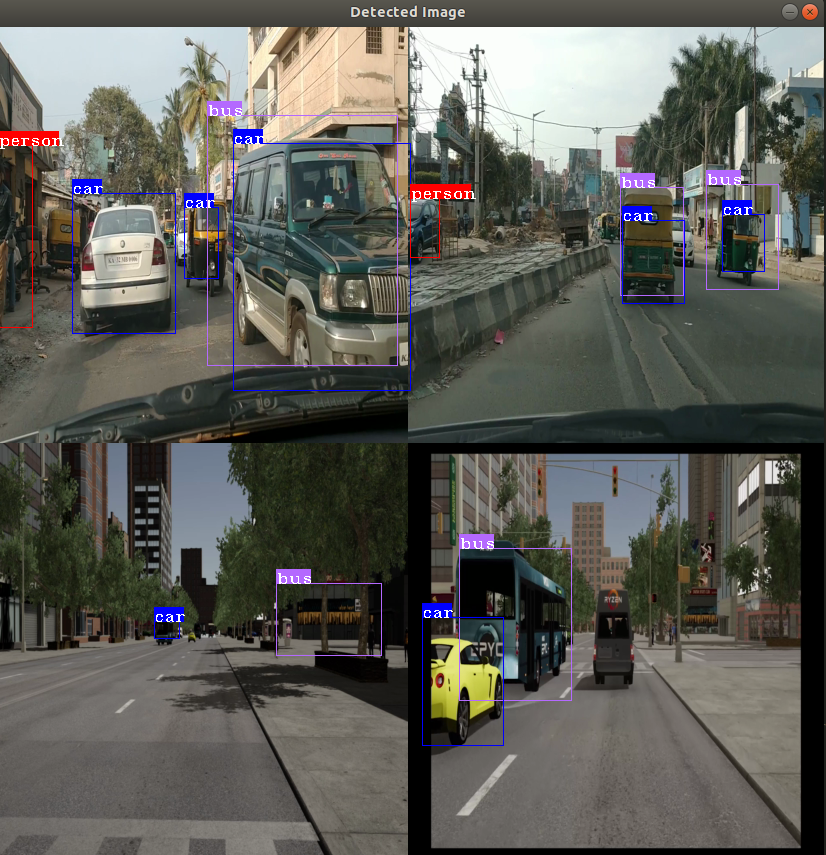
MV Object Detect Sample#
The mv_objdetect sample shows how to run video decoding and object detection using a pre-trained YoloV2 Caffe model.
The sample demonstrates the use of mv_compile utility to do video decoding and inference.