HIP programming model#
The HIP programming model makes it easy to map data-parallel C/C++ algorithms to massively parallel, wide single instruction, multiple data (SIMD) architectures, such as GPUs.
While the model may be expressed in most imperative languages, (for example Python via PyHIP) this document will focus on the original C/C++ API of HIP.
A basic understanding of the underlying device architecture helps you make efficient use of HIP and general purpose graphics processing unit (GPGPU) programming in general.
RDNA & CDNA architecture summary#
GPUs in general are made up of basic building blocks called compute units (CUs), that execute the threads of a kernel. These CUs provide the necessary resources for the threads: the Arithmetic Logical Units (ALUs), register files, caches and shared memory for efficient communication between the threads.
This design allows for efficient execution of kernels while also being able to scale from small GPUs embedded in APUs with few CUs up to GPUs designed for data centers with hundreds of CUs. Figure Block Diagram of an RDNA3 Compute Unit. and Block Diagram of a CDNA3 Compute Unit. show examples of such compute units.
For architecture details, check Hardware implementation.
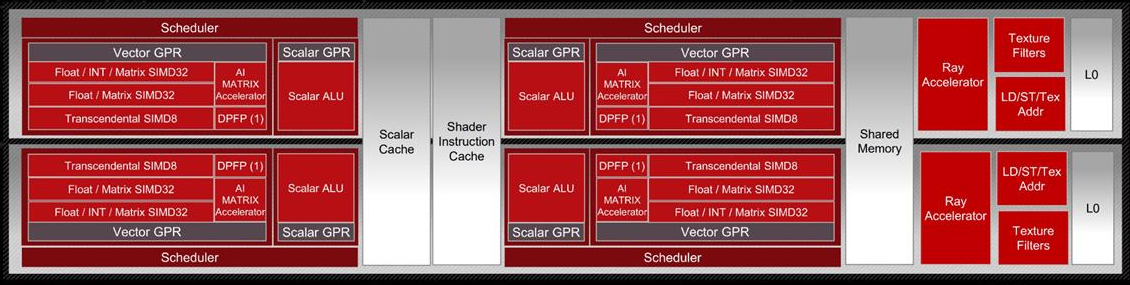
Block Diagram of an RDNA3 Compute Unit.#

Block Diagram of a CDNA3 Compute Unit.#
Heterogeneous Programming#
The HIP programming model assumes two execution contexts. One is referred to as
host while compute kernels execute on a device. These contexts have
different capabilities, therefor slightly different rules apply. The host
execution is defined by the C++ abstract machine, while device execution
follows the SIMT model of HIP. These execution contexts in
code are signified by the __host__ and __device__ decorators. There are
a few key differences between the two:
The C++ abstract machine assumes a unified memory address space, meaning that one can always access any given address in memory (assuming the absence of data races). HIP however introduces several memory namespaces, an address from one means nothing in another. Moreover, not all address spaces are accessible from all contexts.
Looking at Block Diagram of an RDNA3 Compute Unit. and Block Diagram of a CDNA3 Compute Unit., you can see that every CU has an instance of storage backing the namespace
__shared__. Even if the host were to have access to these regions of memory, the performance benefits of the segmented memory subsystem are supported by the inability of asynchronous access from the host.Not all C++ language features map cleanly to typical device architectures, some are very expensive (meaning slow) to implement on GPU devices, therefor they are forbidden in device contexts to avoid users tapping into features that unexpectedly decimate their program’s performance. Offload devices targeted by HIP aren’t general purpose devices, at least not in the sense that a CPU is. HIP focuses on data parallel computations and as such caters to throughput optimized architectures, such as GPUs or accelerators derived from GPU architectures.
Asynchrony is at the forefront of the HIP API. Computations launched on the device execute asynchronously with respect to the host, and it is the user’s responsibility to synchronize their data dispatch/fetch with computations on the device.
Note
HIP does perform implicit synchronization on occasions, more advanced than other APIs such as OpenCL or SYCL, in which the responsibility of synchronization mostly depends on the user.
Single instruction multiple threads (SIMT)#
The SIMT programming model behind the HIP device-side execution is a middle-ground between SMT (Simultaneous Multi-Threading) programming known from multicore CPUs, and SIMD (Single Instruction, Multiple Data) programming mostly known from exploiting relevant instruction sets on CPUs (for example SSE/AVX/Neon).
A HIP device compiler maps SIMT code written in HIP C++ to an inherently SIMD architecture (like GPUs). This is done by scalarizing the entire kernel and issuing the scalar instructions of multiple kernel instances (called threads) to each of the SIMD engine lanes, rather than exploiting data parallelism within a single instance of a kernel and spreading identical instructions over the available SIMD engines.
Consider the following kernel:
__global__ void k(float4* a, const float4* b)
{
int tid = threadIdx.x;
int bid = blockIdx.x;
int dim = blockDim.x;
a[tid] += (tid + bid - dim) * b[tid];
}
The incoming four-vector of floating-point values b is multiplied by a
scalar and then added element-wise to the four-vector floating-point values of
a. On modern SIMD-capable architectures, the four-vector ops are expected to
compile to a single SIMD instruction. However, GPU execution of this kernel will
typically break down the vector elements into 4 separate threads for parallel execution,
as seen in the following figure:

Instruction flow of the sample SIMT program.#
In HIP, lanes of the SIMD architecture are fed by mapping threads of a SIMT
execution, one thread down each lane of an SIMD engine. Execution parallelism
usually isn’t exploited from the width of the built-in vector types, but across multiple threads via the thread ID constants threadIdx.x, blockIdx.x, etc.
Inherent thread model#
The SIMT nature of HIP is captured by the ability to execute user-provided device programs, expressed as single-source C/C++ functions or sources compiled online/offline to binaries, in bulk.
All threads of a kernel are uniquely identified by a set of integral values, called thread IDs. The set of integers identifying a thread relate to the hierarchy in which the threads execute.
The thread hierarchy inherent to how AMD GPUs operate is depicted in the following figure.

Hierarchy of thread groups.#
- Warp (or Wavefront)
The innermost grouping of threads is called a warp, or a wavefront in ISA terms. A warp is the most tightly coupled groups of threads, both physically and logically. Threads inside a warp are also called lanes, and the integral value identifying them is the lane ID.
Tip
Lane IDs aren’t queried like other thread IDs, but are user-calculated. As a consequence, they are only as multidimensional as the user interprets the calculated values to be.
The size of a warp is architecture dependent and always fixed. For AMD GPUs the wavefront is typically 64 threads, though sometimes 32 threads. Warps are signified by the set of communication primitives at their disposal, as discussed in Warp cross-lane functions.
- Block
The middle grouping is called a block or thread block. The defining feature of a block is that all threads in a block will share an instance of memory which they may use to share data or synchronize with one another.
The size of a block is user-configurable but is limited by the queryable capabilities of the executing hardware. The unique ID of the thread within a block is 3-dimensional as provided by the API. When linearizing thread IDs within a block, assume the “fast index” being dimension
x, followed by theyandzdimensions.
- Grid
The outermost grouping is called a grid. A grid manifests as a single dispatch of kernels for execution. The unique ID of each block within a grid is 3-dimensional, as provided by the API and is queryable by every thread within the block.
Cooperative groups thread model#
The Cooperative groups API introduces new APIs to launch, group, subdivide, synchronize and identify threads, as well as some predefined group-collective algorithms, but most importantly a matching threading model to think in terms of. It relaxes some restrictions of the Inherent thread model imposed by the strict 1:1 mapping of architectural details to the programming model. Cooperative groups let you define your own set of thread groups which may fit your user-cases better than the defaults defined by the hardware.
Note
The implicit groups defined by kernel launch parameters are still available when working with cooperative groups.
For further information, see Cooperative groups.
Memory model#
The hierarchy of threads introduced by the Inherent thread model is induced by the memory subsystem of GPUs. The following figure summarizes the memory namespaces and how they relate to the various levels of the threading model.

Memory hierarchy.#
- Local or per-thread memory
Read-write storage only visible to the threads defining the given variables, also called per-thread memory. The size of a block for a given kernel, and thereby the number of concurrent warps, are limited by local memory usage. This relates to an important aspect: occupancy. This is the default memory namespace.
- Shared memory
Read-write storage visible to all the threads in a given block.
- Global
Read-write storage visible to all threads in a given grid. There are specialized versions of global memory with different usage semantics which are typically backed by the same hardware storing global.
- Constant
Read-only storage visible to all threads in a given grid. It is a limited segment of global with queryable size.
- Texture
Read-only storage visible to all threads in a given grid and accessible through additional APIs.
- Surface
A read-write version of texture memory.
Execution model#
HIP programs consist of two distinct scopes:
The host-side API running on the host processor. There are two APIs available:
The HIP runtime API which enables use of the single-source programming model.
The HIP driver API which sits at a lower level and most importantly differs by removing some facilities provided by the runtime API, most importantly around kernel launching and argument setting. It is geared towards implementing abstractions atop, such as the runtime API itself. Offers two additional pieces of functionality not provided by the Runtime API:
hipModuleandhipCtxAPIs. For further details, check HIP driver API.
The device-side kernels running on GPUs. Both the host and the device-side APIs have synchronous and asynchronous functions in them.
Note
The HIP does not present two separate APIs link NVIDIA CUDA. HIP only extends
the HIP runtime API with new APIs for hipModule and hipCtx.
Host-side execution#
The part of the host-side API which deals with device management and their queries are synchronous. All asynchronous APIs, such as kernel execution, data movement and potentially data allocation/freeing all happen in the context of device streams.
Streams are FIFO buffers of commands to execute relating to a given device. Commands which enqueue tasks on a stream all return promptly and the command is executed asynchronously. All side effects of a command on a stream are visible to all subsequent commands on the same stream. Multiple streams may point to the same device and those streams may be fed from multiple concurrent host-side threads. Execution on multiple streams may be concurrent but isn’t required to be.
Asynchronous APIs involving a stream all return a stream event which may be used to synchronize the execution of multiple streams. A user may enqueue a barrier onto a stream referencing an event. The barrier will block until the command related to the event does not complete, at which point all side effects of the command shall be visible to commands following the barrier, even if those side effects manifest on different devices.
Streams also support executing user-defined functions as callbacks on the host. The stream will not launch subsequent commands until the callback completes.
Device-side execution#
The SIMT programming model behind the HIP device-side execution is a middle-ground between SMT (Simultaneous Multi-Threading) programming known from multicore CPUs, and SIMD (Single Instruction, Multiple Data) programming mostly known from exploiting relevant instruction sets on CPUs (for example SSE/AVX/Neon).
Kernel launch#
Kernels may be launched in multiple ways all with different syntaxes and intended use-cases.
Using the triple-chevron
<<<...>>>operator on a__global__annotated function.Using
hipLaunchKernelGGL()on a__global__annotated function.Tip
This name by default is a macro expanding to triple-chevron. In cases where language syntax extensions are undesirable, or where launching templated and/or overloaded kernel functions define the
HIP_TEMPLATE_KERNEL_LAUNCHpreprocessor macro before including the HIP headers to turn it into a templated function.Using the launch APIs supporting the triple-chevron syntax directly.
Caution
These APIs are intended to be used/generated by tools such as the HIP compiler itself and not intended towards end-user code. Should you be writing a tool having to launch device code using HIP, consider using these over the alternatives.